Máquinas Simples
Palanca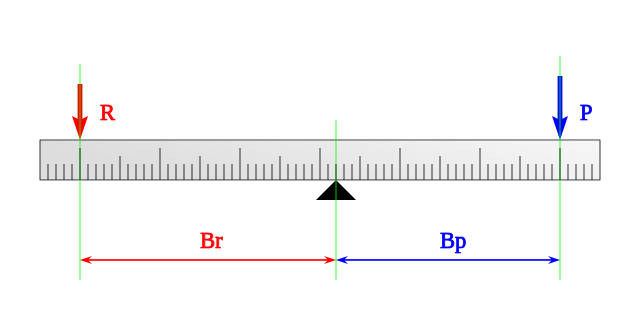
|
Una palanca es una máquina simple, es decir, un dispositivo capaz de modificar o generar una fuerza y transmitir desplazamiento. Está compuesta por una barra rígida de algún material medianamente resistente, que gira libremente sobre un punto de apoyo.
Una palanca puede usarse para maximizar la fuerza mecánica aplicada sobre un objeto, incrementar su velocidad o la distancia que recorre, a través de la aplicación de una cantidad proporcionalmente menor de fuerza.
Dependiendo de la proximidad o lejanía del fulcro respecto del cuerpo a mover, se requerirá de más o menos fuerza aplicada y se logrará un efecto mayor o menor. |
Sobre una palanca actúan simultáneamente tres fuerzas:
- Potencia (P). Es la fuerza aplicada voluntariamente en el extremo de la palanca, con el fin de generar una reacción. Puede ejecutarse manualmente o mediante un peso, o incluso motores eléctricos o de vapor.
- Resistencia (R). Es la fuerza a vencer por la potencia, esto es, el peso que ejerce sobre la palanca el cuerpo que deseamos mover y que será equivalente, por la Ley de acción y reacción, a la que ejerza sobre él la palanca.
- Fuerza de apoyo. Es la fuerza que ejerce el punto de apoyo sobre la palanca, igual y opuesta a las dos anteriores, ya que la barra se sostiene sin desplazarse sobre el punto de apoyo.
- Brazo de potencia (Bp). Es la distancia entre el punto de apoyo y el punto de aplicación de la potencia.
- Brazo de resistencia (Br). Es la distancia entre el fulcro y la carga o el cuerpo a movilizar.
Todo lo anterior se relaciona a través de la siguiente fórmula que da lugar a la ley de la palanca:
P x Bp = R x Br,
la potencia por su brazo es igual a la resistencia por el suyo.
P x Bp = R x Br,
la potencia por su brazo es igual a la resistencia por el suyo.
De esta forma, como norma general, cuanto mayor sea la distancia al punto de apoyo con la que aplicamos la fuerza actuante F, mayor ventaja tendremos respecto a la fuerza resistente R. Este principio se cumplirá siempre y para ello, debemos suponer que la barra que hace de palanca es rígida y resistente.
Existen tres tipos de palanca, dependiendo de la posición relativa del punto de resistencia, el de potencia y el fulcro. Cada una tiene características diferentes y tendrá un efecto relativamente distinto.
|
|
|
|
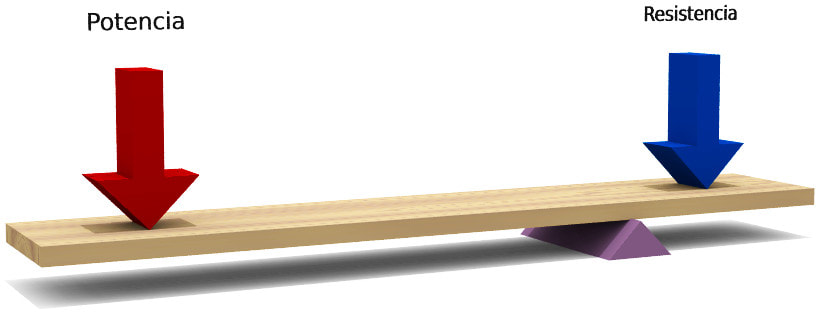
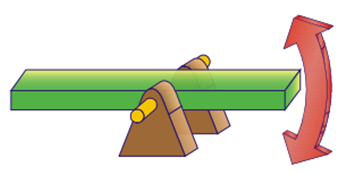
Palanca de primer grado. El punto de apoyo está entre la potencia y la resistencia, logrando que la potencia aplicada pueda ser mucho menor que la resistencia a vencer, es decir, maximiza la potencia. Sin embargo, se sacrifica la velocidad transmitida y la distancia recorrida por el cuerpo.
El balancín, las tijeras, las tenazas, los alicates, las catapultas.
|
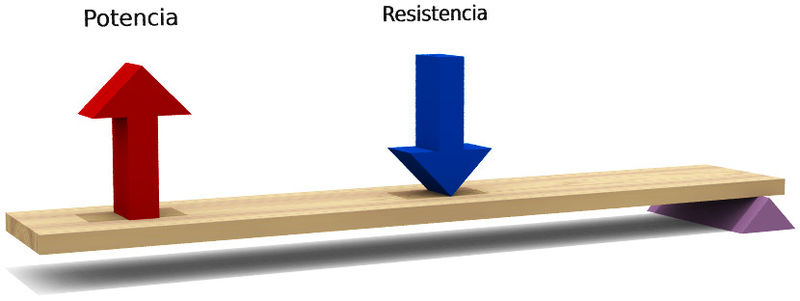
La resistencia está entre la potencia y el punto de apoyo, por lo que la potencia será siempre menor que la resistencia, aunque no logre mayor desplazamiento ni distancia recorrida (pero el ahorro de energía es sumamente útil).
La carretilla, el cascanueces, una embarcación a remos, una camilla de enfermería, una máquina de hacer ejercicios por levantamiento.
|
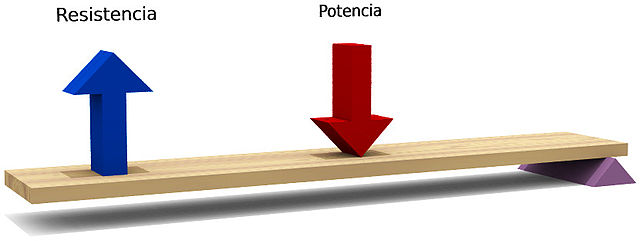
La potencia ejercida está entre el punto de apoyo, en un extremo, y la resistencia, en el otro. La fuerza aplicada es mayor que la resultante, pero se logra ampliar la velocidad transmitida o la distancia recorrida por el cuerpo.
Una caña de pescar, un quitagrapas, una pinza de cejas o la articulación témporo-mandibular del cuerpo humano.
|
|
Se conoce como polea a una máquina simple diseñada para transmitir fuerza y operar como un mecanismo de tracción, reduciendo la cantidad de fuerza necesaria para mover o suspender en el aire un peso. Consiste en una rueda que gira sobre un eje central y provista de un canal en su periferia por donde pasa una cuerda.
La polea puede definirse además como el punto de apoyo de una cuerda que se mueve en torno a él sin darle una vuelta completa; tal es la definición del científico francés Hatón de la Goupillière. Así, en uno de los extremos de dicha cuerda actúa una resistencia o peso, mientras en la otra una potencia o fuerza.
|
Polea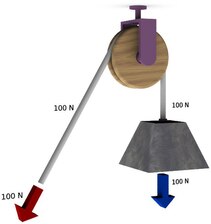
|
Toda polea se compone de cuatro partes fundamentales:
- Eje. La porción fija en torno a la cual se inserta o se suspende la polea y que permite su giro libre. Se trata de la parte inmóvil y central.
- Llanta. La zona externa de la polea, donde se halla la garganta por donde pasa la cuerda.
- Cuerpo. La parte media de la polea, entre el cubo y la llanta, diseñada para girar ante la acción de la fuerza, provista de brazos o nervios para facilitar su movimiento.
- Cubo. La parte interna de la polea (el agujero cilíndrico al que se acopla el eje).
|
Existen dos formas de clasificación de las poleas:
|
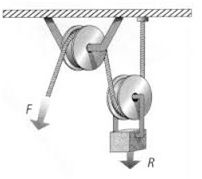
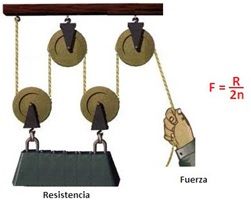
Un aparejo factorial consiste en montar varias poleas fijas acopladas en una sola armadura que se conectan mediante una sola cuerda con otras poleas móviles que se montan en otra armadura.
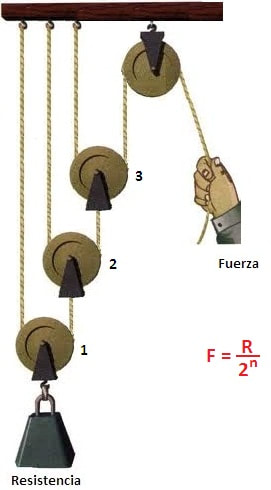
El aparejo potencial es otro tipo de polipastos que se presenta cuando cada polea móvil está sujeta a un punto fijo a través de una cuerda
El aparejo potencial es otro tipo de polipastos que se presenta cuando cada polea móvil está sujeta a un punto fijo a través de una cuerda
|
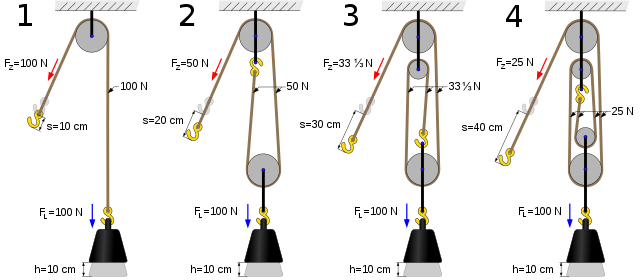
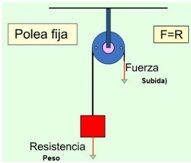
Fórmula polea simple:
Fuerza = Resistencia. |
Fórmula polea móvil:
Fuerza = R/2 |
Fórmula aparejo factorial. (polipastos): F = R/2n
Donde n es el número de poleas fijas o móviles que son siempre las mismas La cantidad de cuerda L, que hay que recoger para subir una altura H es: L = 2n * H |
Fórmula aparejo potencial.
Fuerza = R/2^n Donde n es el número de poleas móviles La cantidad de cuerda L, que hay que recoger para subir una altura H es: L = 2^n * H |
|
|
|
|
|
|
|
Máquinas Compuestas
Cuando no es posible resolver un problema técnico en una sola etapa hay que recurrir al empleo de una máquina compuesta, que no es otra cosa que una sabia combinación de diversas máquinas simples, de forma que la salida de cada una de ellas se aplica directamente a la entrada de la siguiente hasta conseguir cubrir todas las fases necesarias.
Las máquinas simples, por su parte, se agrupan dando lugar a los mecanismos, cada uno encargado de hacer un trabajo determinado. Si analizamos un taladro de sobremesa podremos ver que es una máquina compuesta formada por varios mecanismos: uno se encarga de crear un movimiento giratorio, otro de llevar ese movimiento del eje del motor al del taladro, otro de mover el eje del taladro en dirección longitudinal, otro de sujetar la broca, otro...
La práctica totalidad de las máquinas empleadas en la actualidad son compuestas, y ejemplos de ellas pueden ser: polipasto, motor de explosión interna (diesel o gasolina), impresora de ordenador, bicicleta, cerradura, lavadora, video...
En las máquinas se emplean 2 tipos básicos de movimientos, obteniéndose el resto mediante una combinación de ellos:
- Movimiento giratorio, cuando el operador no sigue ninguna trayectoria (no se traslada), sino que gira sobre su eje.
- Movimiento lineal, si el operador se traslada siguiendo la trayectoria de una línea recta (la denominación correcta sería rectilíneo).
- Continuo, si el movimiento se realiza siempre en la misma dirección y sentido.
- Alternativo, cuando el operador está dotado de un movimiento de vaivén, es decir, mantiene la dirección pero va alternando el sentido.
Movimiento giratorio
|
Si analizamos la mayoría de las máquinas que el ser humano ha construido a lo largo de la historia: molinos de viento (empleados para moler cereales o elevar agua de los pozos), norias movidas por agua (usadas en molinos, batanes, martillos pilones...), motores eléctricos (empleados en electrodomésticos, juguetes, maquinas herramientas...), motores de conbustión interna (usados en automóviles, motocicletas, barcos...); podremos ver que todas tienen en común el hecho de que transforman un determinado tipo de energía (eólica, hidráulica, eléctrica, química...) en energía de tipo mecánico que aparece en forma de movimiento giratorio continuo en un eje.
|
Por otra parte, si nos fijamos en los antiguos tornos de arco, los actuales exprimidores de cítricos, el mecanismo del péndulo de un reloj o el eje del balancín de un parque infantil, podemos observar que los ejes sobre los que giran están dotados de un movimiento giratorio de vaivén; el eje gira alternativamente en los dos sentidos, es el denominado movimiento giratorio alternativo.
|
Cuando hablamos de movimiento giratorio nos estamos refiriendo siempre el movimiento del eje, mientras que cuando hablamos de movimiento circular solemos referirnos a cuerpos que giran solidarios con el eje describiendo sus extremos una circunferencia. En los ejemplos anteriores podemos observar que las aspas del molino y el péndulo del reloj son los que transmiten el movimiento giratorio a los ejes a los que están unidos. Pero los extremos de las aspas del molino describen una circunferencia, mientras que el péndulo del reloj traza un arco de circunferencia. Se dice entonces que las aspas llevan un movimiento circular y el péndulo uno oscilante (o pendular, o circular alternativo). Este movimiento circular (sea continuo o alternativo) aparece siempre que combinemos un eje de giro con una palanca.
Se puede afirmar que el movimiento giratorio (rotativo o rotatorio) es el más corriente de los que pueden encontrarse en las máquinas y casi el único generado en los motores.
Se puede afirmar que el movimiento giratorio (rotativo o rotatorio) es el más corriente de los que pueden encontrarse en las máquinas y casi el único generado en los motores.
Movimiento lineal
|
Analizando el funcionamiento de una cinta transportadora (como las empleadas en aeropuertos o en las cajas de los supermercados) vemos que todo objeto que se coloque sobre ella adquiere un movimiento lineal en un sentido determinado, lo mismo sucede si nos colocamos en un peldaño de una escalera mecánica. Es el denominado movimiento lineal continuo. Este mismo tipo de movimiento lo encontramos también en las lijadoras de banda o las sierras de cinta.
|
Si ahora nos paramos a estudiar el movimiento de la aguja de una máquina de coser podemos ver que esta sube y baja siguiendo también un movimiento lineal, pero a diferencia del anterior, este es de vaivén; lo mismo sucede con las perforadoras que se emplean para abrir las calles, las bombas de hinchar balones o el émbolo de las máquinas de vapor. A ese movimiento de vaivén que sigue un trazado rectilíneo se le denomina movimiento lineal alternativo.
|
|
|
Mecanismos
Toda máquina compuesta es una combinación de mecanismos; y un mecanismo es una combinación de operadores cuya función es producir, transformar o controlar un movimiento.
Los mecanismos son elementos destinados a transmitir y/o transformar fuerzas y/o movimientos desde un elemento motriz (motor) a un elemento conducido (receptor), con la misión de permitir al ser humano realizar determinados trabajos con mayor comodidad y menor esfuerzo.
En estos mecanismos podemos distinguir tres tipos de movimiento:
a) Movimiento circular o rotatorio, como el que tiene una rueda.
b) Movimiento lineal, es decir, en línea recta y de forma continua.
c) Movimiento alternativo: Es un movimiento de ida y vuelta, de vaivén. Como el de un péndulo.
a) Movimiento circular o rotatorio, como el que tiene una rueda.
b) Movimiento lineal, es decir, en línea recta y de forma continua.
c) Movimiento alternativo: Es un movimiento de ida y vuelta, de vaivén. Como el de un péndulo.
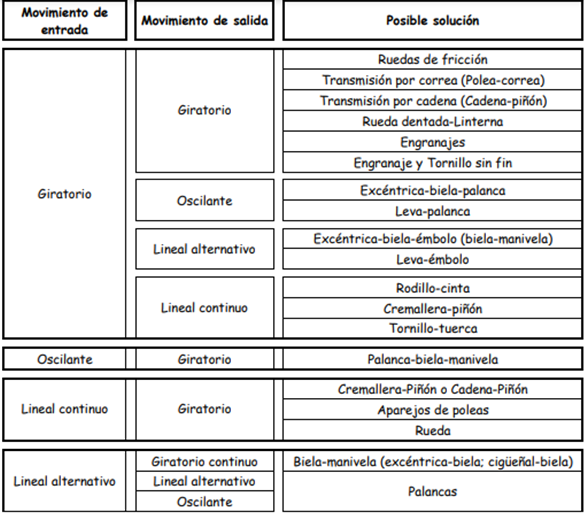
Para diseñar mecanismos para nuestros proyectos de tecnología necesitamos conocer el movimiento que tenemos (movimiento de entrada) y el que queremos (movimiento de salida) para después elegir la combinación de operadores (mecanismo) más adecuada. En el cuadro siguiente se ofrece una clasificación útil para abordar los proyectos de Tecnología.
Mecanismos de transmisión de mvto
Son mecanismos que transmiten el movimiento, la fuerza y la potencia producidos por un elemento motriz (motor) a otro punto, es decir, son aquellos en los que el elemento motriz (o de entrada) y el elemento conducido (o de salida) tienen el mismo tipo de movimiento.
Hay dos tipos de mecanismos de transmisión:
Hay dos tipos de mecanismos de transmisión:
- Mecanismos de transmisión lineal: el elemento de entrada y el de salida tienen movimiento lineal: Palanca, polea, polipasto
- Mecanismos de transmisión circular: el elemento de entrada y el de salida tienen movimiento circular: Poleas de transmisión, engranajes, transmisión por cadena, tornillo sinfín
|
son elementos de máquinas que transmiten un movimiento circular entre dos árboles de transmisión gracias a la fuerza de rozamiento entre dos ruedas que se encuentran en contacto directo. A este tipo de transmisión también se le conoce como transmisión por fricción.
Relación de transmisión: Es la relación de velocidades entre la rueda conducida (o receptor) y la rueda conductora (o motriz), o lo que es lo mismo, entre la rueda de salida y la rueda de entrada. r = n2 / n1 En el caso de ruedas de fricción, la relación de transmisión en función de los diámetros de las mismas será: r = n2 / n1= d1 / d2 Siendo:
|
Ruedas de fricción
Debido a que el único medio de unión entre ambas ruedas es la fricción que se produce entre sus perímetros, no pueden ser empleadas para la transmisión de grandes esfuerzos. Se suelen encontrar en aparatos electrodomésticos de audio y vídeo, así como en algunas atracciones de feria (norias, vaivenes...) en las que un neumático acciona una pista de rodadura.
|
Poleas de transmisión
Las poleas de transmisión son mecanismos que transmiten un movimiento circular entre ejes separados. El sentido de giro de las poleas se puede cambiar según la disposición de la correa. La relación de transmisión se puede hallar relacionando el diámetro de las poleas.
D1 x W1 = D2 x W2 recuerda W en r.p.m. y los dos diámetros en la misma unidad. |
Su utilidad se centra en la transmisión de movimiento giratorio entre dos ejes distantes; permitiendo aumentar, disminuir o mantener la velocidad de giro, mientras mantiene o invierte el sentido.
La podemos encontrar en lavadoras, ventiladores, lavaplatos, pulidoras, videos, multicultores, cortadores de carne, taladros, generadores de electricidad, cortadoras de cesped, transmisiones de motores, compresores, tornos... en forma de multiplicador de velocidad, caja de velocidades o tren de poleas. |
|
|
Engranaje recto
Los engranajes son piezas dentadas que transmiten el movimiento circular entre ejes cercanos mediante el empuje que ejercen los dientes de unas piezas sobre otras.La velocidad de las piezas es mayor cuanto menor sea su tamaño. La relación de transmisión se puede hallar relacionando el diámetro de las ruedas dentadas. El sentido de giro se invierte.
|
Para calcular estos mecanismos es muy parecido a los sistemas de poleas, cambiando el diámetro por el número de dientes de cada rueda. Su fórmula es:
Z1 x N1 = Z2 x N2
Donde Z es el número de dientes y N la velocidad en rpm (revoluciones o vueltas por minuto). La velocidad en rpm se llama N para no confundirla con la velocidad V en metros/segundo, que son diferentes.
Z1 x N1 = Z2 x N2
Donde Z es el número de dientes y N la velocidad en rpm (revoluciones o vueltas por minuto). La velocidad en rpm se llama N para no confundirla con la velocidad V en metros/segundo, que son diferentes.
Se emplea para la transmisión de movimientos entre dos ejes distantes, bien acoplándose directamente varias ruedas dentadas entre sí (tren de engranajes) o empleando una cadena articulada (mecanismo cadena-piñón).
El primer sistema se emplea mucho en automóviles (cambio de marchas), máquinas herramientas (taladros, tornos, fresadoras...), relojería...; mientras que el segundo solemos verlo en bicicletas, motos, puertas de apertura automática (ascensores, supermercados, aeropuertos...), mecanismos internos de motores...
El primer sistema se emplea mucho en automóviles (cambio de marchas), máquinas herramientas (taladros, tornos, fresadoras...), relojería...; mientras que el segundo solemos verlo en bicicletas, motos, puertas de apertura automática (ascensores, supermercados, aeropuertos...), mecanismos internos de motores...
Engranaje helicoidal
Los engranajes helicoidales tienen la ventaja que transmiten más potencia que los rectos, y también pueden transmitir más velocidad, son más silenciosos y más duraderos; además, pueden transmitir el movimiento de ejes que se corten. De sus inconvenientes se puede decir que se desgastan más que los rectos, son más caros de fabricar y necesitan generalmente más engrase que los rectos.
|
|
Transmisión por cadena
Una cadena de transmisión sirve para transmitir el movimiento a las ruedas o de un mecanismo a otro. Los ejes de giro pueden estar relativamente alejados. Se usan para transmitir el movimiento de los pedales a la rueda en las bicicletas o dentro de un motor para transmitir movimiento de un mecanismo a otro.
|
Tornillo sinfin
En el siguiente enlace puedes ver la simulación de un tornillo sin fin. Fíjate en la gran reducción de velocidad que produce este mecanismo sobre el eje de salida. El movimiento sólo se puede transmitir del tornillo hacia la rueda dentada (mecanismo no reversible). Los ejes de giro se cruzan formando un ángulo de 90º.
Por cada vuelta del tornillo sin fin, el engranaje acoplado sólo gira un diente. Por tanto permite reducir mucho la velocidad de giro. La relación de transmisión en este sistema es: r = 1 / z siendo z el número de dientes de la rueda. |
Mecanismos de transformación de mvto
Son aquellos mecanismos que transforman un movimiento circular en rectilíneo, o viceversa, es decir, son aquellos en los que el elemento motriz y el conducido tienen distinto tipo de movimiento.
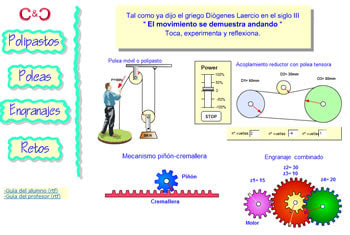
Piñón cremallera
Una rueda con dientes (piñón) engrana con una barra dentada (cremallera). Transforma el movimiento circular en rectilíneo o viceversa. Es un mecanismo reversible ya que el elemento motor puede ser tanto la cremallera como el piñón.
Por cada vuelta que da el piñón (que es una rueda dentada), la cremallera se desplaza en línea recta tantos dientes como dientes tenga el piñón.
Ej: Tenemos una cremallera que tiene 4 dientes por cada centímetro y un piñón de 20 dientes. Responde:
a) ¿Qué longitud avanza la cremallera cuando el piñón da 6 vueltas?
Cuando el piñón da una vuelta, la cremallera avanza 20 dientes. Como la cremallera tiene 4 dientes cada cm, con una vuelta del piñón avanzará 20/4 = 5 cm. Por tanto, con 6 vueltas del piñón avanzará 6 × 5 = 30 cm
b) ¿Cuántas vueltas da el piñón cuando desplazamos la cremallera 10 cm?
Al desplazar la cremallera 10 cm se moverán en contacto con el piñón 10 × 4 = 40 dientes. Como por cada 20 dientes el piñón da una vuelta, al pasar 40 dientes dará 40/20 = 2 vueltas.
Por cada vuelta que da el piñón (que es una rueda dentada), la cremallera se desplaza en línea recta tantos dientes como dientes tenga el piñón.
Ej: Tenemos una cremallera que tiene 4 dientes por cada centímetro y un piñón de 20 dientes. Responde:
a) ¿Qué longitud avanza la cremallera cuando el piñón da 6 vueltas?
Cuando el piñón da una vuelta, la cremallera avanza 20 dientes. Como la cremallera tiene 4 dientes cada cm, con una vuelta del piñón avanzará 20/4 = 5 cm. Por tanto, con 6 vueltas del piñón avanzará 6 × 5 = 30 cm
b) ¿Cuántas vueltas da el piñón cuando desplazamos la cremallera 10 cm?
Al desplazar la cremallera 10 cm se moverán en contacto con el piñón 10 × 4 = 40 dientes. Como por cada 20 dientes el piñón da una vuelta, al pasar 40 dientes dará 40/20 = 2 vueltas.
Torno |
Tornillo - Tuerca |
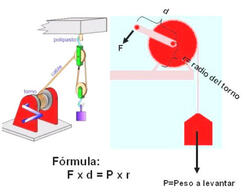
Manivela-Torno - Imagen de Areatecnología
|
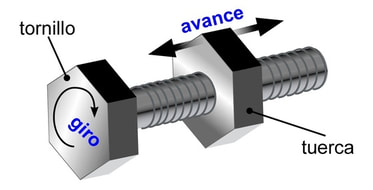
Tornillo-Tuerca - Imagen de edu.xunta.es
|
|
Un torno es una barra unida a un eje al que hace girar. La fuerza que se necesita para girar este eje es menor que el que haría falta aplicar directamente.
El mecanismo manivela-torno consiste en un cilindro horizontal (tambor) sobre el que se enrolla (o desenrolla) una cuerda o cable cuando le comunicamos un movimiento giratorio a su eje. Se cumple esta ecuación: F . d = P . r ; F = P. r / d donde F es la fuerza, P es el peso a levantar, r es el radio del torno y d el brazo de la manivela Si la relación entre r y d es pequeña el torno permite levantar pesos con poco esfuerzo. Cuanto más fino es el cilindro, más vueltas hay que darle a la manivela para subir la carga una determinada altura. Si llamamos Nv al número de vueltas, r al radio del cilindro y H a la altura que sube la carga, se cumple: Nv = H/ 2 · π · r |
Mecanismo compuesto por un eje roscado (husillo) y una tuerca con la misma rosca que el eje. Si se gira la tuerca, ésta se desplaza linealmente sobre el husillo (y viceversa).
Por ejemplo en el gato de los coches, podemos conseguir un movimiento lineal (perpendicular al suelo) a partir de un movimiento circular (al girar la manivela). El paso de rosca de un tornillo es la distancia entre dos filetes (salientes) consecutivos de la rosca del tornillo. D = p x NV donde D es el Desplazamiento, P el paso de rosca y Nv el número de vueltas |
Leva y seguidorEl sistema está formado por un disco que gira de forma excéntrica y un seguidor que está en constante contacto con el disco. Transforma el movimiento circular en rectilíneo de vaivén. El movimiento sólo se puede transmitir de la leva hacia el seguidor (mecanismo no reversible).
|
|
|
|
La manivela tiene un movimiento circular. Un extremo de la biela tiene un movimiento de vaivén y el otro lo tiene circular. Transforma el movimiento circular en rectilíneo de vaivén o viceversa.
|
Biela-Manivela
|
Cigüeñal
|
Es un sistema compuesto por la unión de múltiples manivelas en un mismo eje acopladas a sus correspondientes bielas. Transforma un movimiento circular en los movimientos alternativos de vaivén desacompasados de las diferentes bielas. También puede transformar los movimientos de vaivén desacompasados de las diferentes bielas en un movimiento circular. Los cigüeñales son empleados en todo tipo de mecanismos que precisen movimientos alternativos sincronizados como por ejemplo los motores de los coches |
Sistema mecánico
Los sistemas mecánicos son una combinación de mecanismos y piezas simples que forman parte de una máquina. Para conseguir el funcionamiento de las máquinas se necesita de la existencia del movimiento de algunas de sus partes. Gracias a esta acción se puede generar velocidad, transmitir esfuerzos y acelerar las piezas en movimiento.
Fuente: http://concurso.cnice.mec.es/cnice2006/material107/
ACTIVIDADES
Vamos a hacer una actividad de Mecánica básica Engranajes, con animaciones de poleas, ruedas de fricción y engranajes....
Este proyecto de Mecánica Básica realizado por Celestino Capell Arqués y dirigido a alumnos de la ESO pretende ser un punto de apoyo para el entendimiento de diferentes ingenios mecánicos presentes en infinidad de artilugios y que han sido fundamentales en nuestra evolución tecnológica.
Este proyecto de Mecánica Básica realizado por Celestino Capell Arqués y dirigido a alumnos de la ESO pretende ser un punto de apoyo para el entendimiento de diferentes ingenios mecánicos presentes en infinidad de artilugios y que han sido fundamentales en nuestra evolución tecnológica.
|
Debéis realizar los siguientes ejercicios sacados del departamento de Tecnología de IES Bellavista y subirlos a classroom;
|
Reto final: Con todo lo que hemos visto serías capaz de resolverlo?

@Wikingenieria
|
Para aplicar los contenidos vistos vamos a realizar la construcción de un juguete que al girar una manivela dote de movimiento ascendente-descendente a alguna de sus piezas. Se utilizarán preferiblemente materiales reciclados: cartón, tapones, cajas, etc
PRIMERA FASE: BÚSQUEDA DE INFORMACIÓN.
Lo primero que deberíamos hacer es buscar información en torno a proyectos similares con el fin de obtener ideas que podamos adaptar. Los recursos que encontréis junto a una descripción de los mismos debéis pegarlos en la tabla que os proporciono a través de un documento compartido con cada grupo a través de Google Drive.
Para empezar os proporciono una serie de enlaces, que además contienen los tipos de mecanismos que suelen contener este tipo de juguetes.
- http://www.rinconsolidario.org/ciencias/biblioteca/descargas/tecnolog/construcciondemecanismos2.pdf
- http://www.technologystudent.com/index.htm
- http://ieshuelin.com/huelinwp/2017/04/propuesta-de-construccion-mecanismos/
- https://sites.google.com/site/tecnojh/tecnologias-1oeso/maquinas-y-mecanismos/proyecto-juguete-mecanico
SEGUNDA FASE: ELABORACIÓN DEL BOCETO Y DESCRIPCIÓN DEL FUNCIONAMIENTO.
PRIMERA FASE: BÚSQUEDA DE INFORMACIÓN.
Lo primero que deberíamos hacer es buscar información en torno a proyectos similares con el fin de obtener ideas que podamos adaptar. Los recursos que encontréis junto a una descripción de los mismos debéis pegarlos en la tabla que os proporciono a través de un documento compartido con cada grupo a través de Google Drive.
Para empezar os proporciono una serie de enlaces, que además contienen los tipos de mecanismos que suelen contener este tipo de juguetes.
- http://www.rinconsolidario.org/ciencias/biblioteca/descargas/tecnolog/construcciondemecanismos2.pdf
- http://www.technologystudent.com/index.htm
- http://ieshuelin.com/huelinwp/2017/04/propuesta-de-construccion-mecanismos/
- https://sites.google.com/site/tecnojh/tecnologias-1oeso/maquinas-y-mecanismos/proyecto-juguete-mecanico
SEGUNDA FASE: ELABORACIÓN DEL BOCETO Y DESCRIPCIÓN DEL FUNCIONAMIENTO.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fuente: http://www.aprender20.es/
